The 3D model of the Lego robot is quite complex and is therefore not suitable for determining the axes.
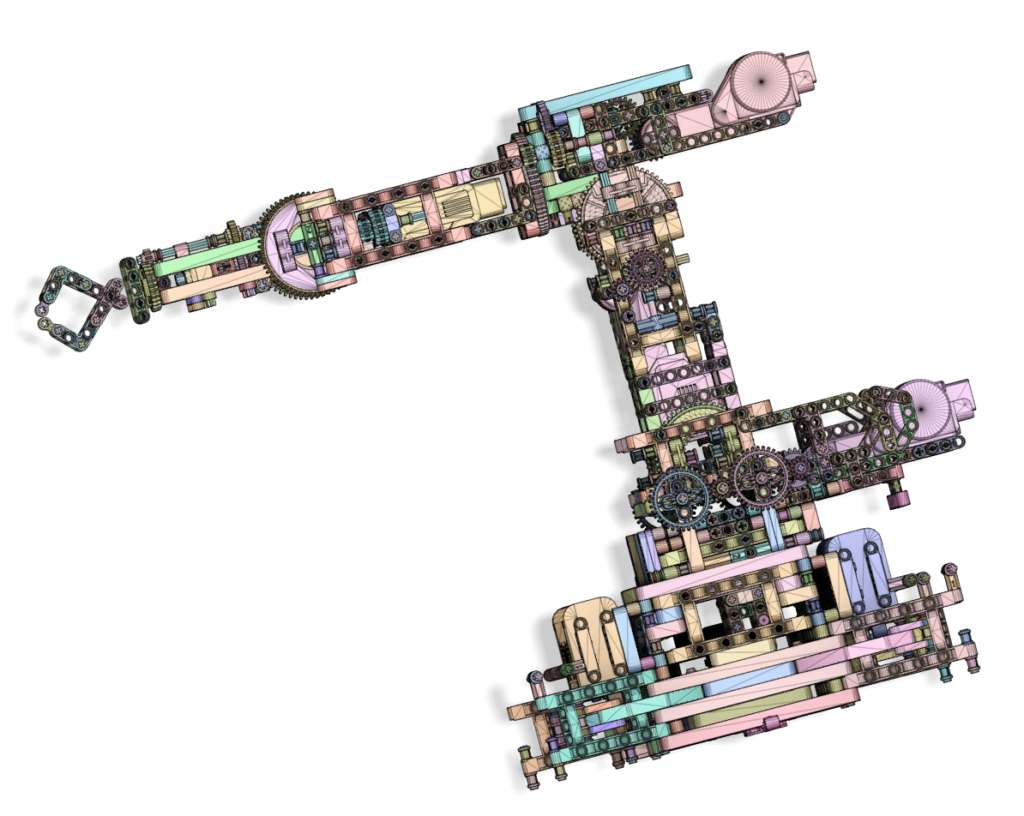
To make it easier to measure the robot model, the complex Lego model was simplified. The center distances were taken from the complex model.

tech stuff from Herbert
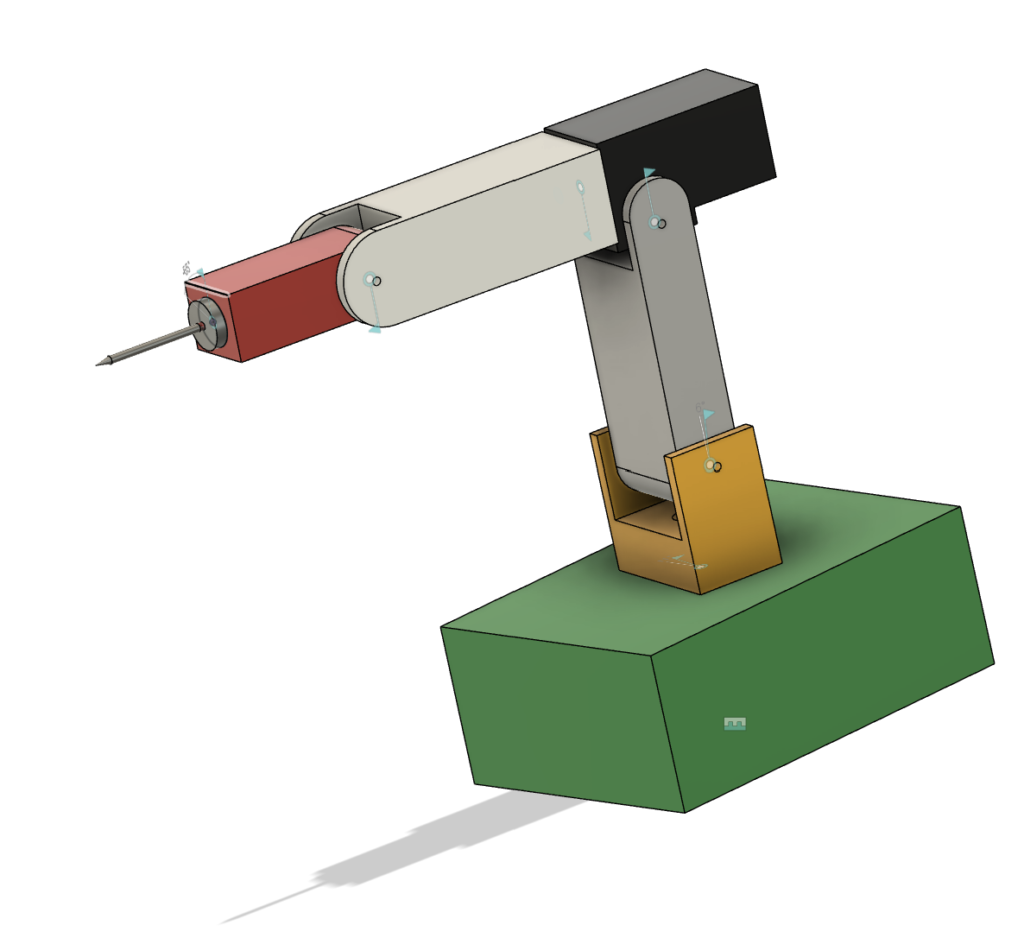
The 3D model of the Lego robot is quite complex and is therefore not suitable for determining the axes.
To make it easier to measure the robot model, the complex Lego model was simplified. The center distances were taken from the complex model.
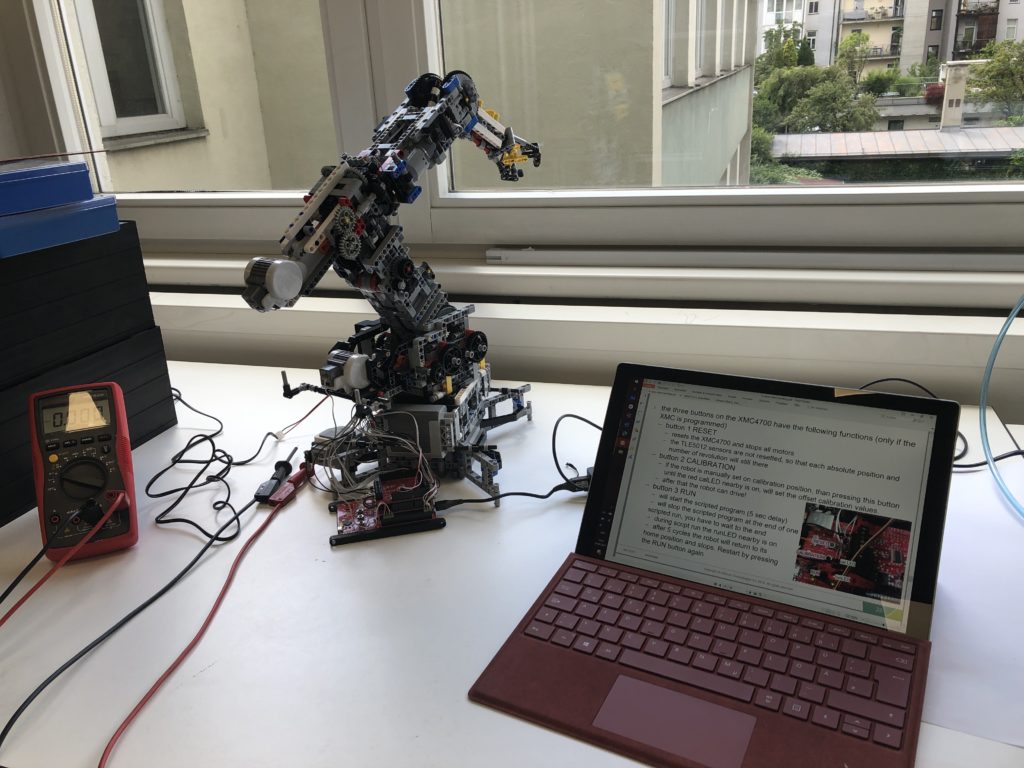
In order to be able to test all functions, a demo program is stored with which all axes are operated. The axes are approached up to the maximum limits. Here it turned out that the maximum deflection was not recognized for axis 5. After checking the cables and the signals, the error is then only a magnet that has fallen off during transport. This is detected by the magnetic sensor TLE5012B and thus the end stop can be determined. After the correct attachment, the robot functioned properly again and the demo run could be completed.
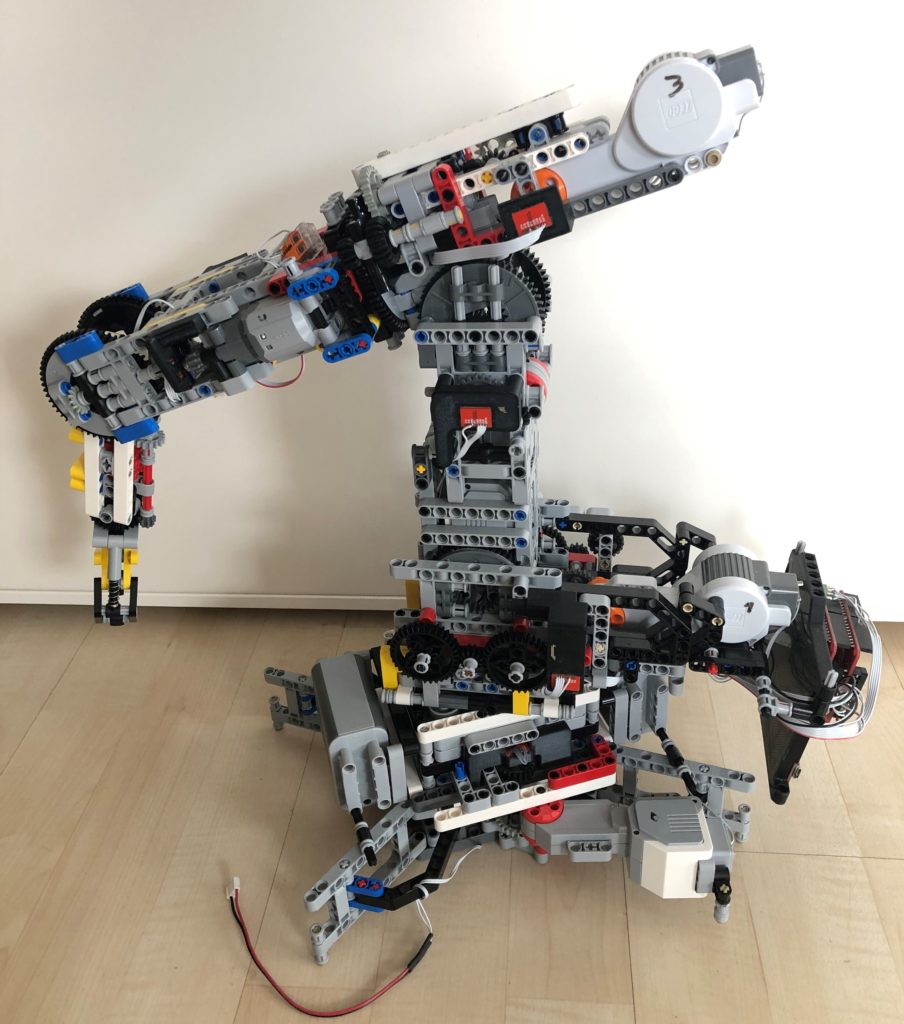
The 6-axis robot was built by Dr. Olaf Filies together with his son Marcus, to be seen in the YouTube video ( https://www.youtube.com/watch?v=K0sfWzCfdn8&t= 70s). For the control, the controller XMC1100 and 2 motor shields TLE94112 were used. To measure the rotation of the axes 6 magnetic sensors TLE5012B are used which are connected to the controller via SPI. The programming of the robot was done with the Arduino
user interface. This project was then ported to the XMC4700.
DIY Robot